Queridos leitores, pedimos desculpas pelo tempo que ficamos sem falar nada sobre o projeto. Nas ultimas semanas estávamos estudando para as provas de quase todas as matérias do curso.
Achamos que o projeto deveria ser entregue em junho porém já temos que entrega-lo quase pronto na semana que vem.
Então devido a pressa tivemos que fazer algumas modificações no projeto:
1. Não usaremos mais o ardumoto shield arduino, mas sim um arduino protoshield. Mas como ninguém recebeu ainda provavelmente não vai dar tempo de apresentar nosso robô com a protoshield já implementada. Mas vamos usar uma improvisação provisória.
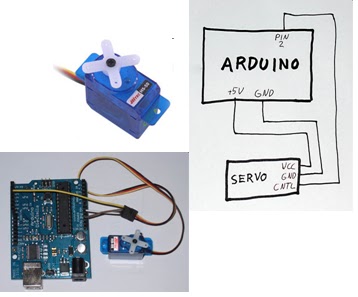
2. Não vamos usar servos hackeados, vamos usar servos normais.
3. Não usaremos mais rodas mas sim pernas, em uma movimentação alias a movimentação vai ficar bem engraçada ^^!
O material para a base que suportará os periféricos do robô não será mais uma placa de acrilico pois não temos tempo para modela-la. O novo material para acoplar o Arduino e os demais componentes será uma caixa de papelão.
Futuramente estaremos implementando o robô para que ele fique mais bonito, com armadura de acrílico e caixinhas para os eletroscópios que ficaram ao redor.
Na caixa de papelão ele ficará mais ou menos assim:

As paletas que vem junto com os servo motores serão as pernas. Esse modo de estruturar o robô, nos trouxe uma grande dificuldade quanto a movimentação do robô. As pernas não tem flexibilidade então ele não ira andar, mas ira saltar para cima do campo elétrico como se fosse um grilo.
A movimentação das pernas será sincronizada, o robô irá recolher uma perna, depois a outra, as pernas nas laterais as que terão que fazer o movimento de pulo irão auxiliar no equilibrio do robo. A imagem abaixo tenta explicar um pouco como será o movimento, o traço preto é a posição da perna controlada pelo servo motor:
O processo no qual o robô senta (na imagem onde todas as barras pretas estão na horizontal) antes de saltar para o lado onde está a fonte de campo elétrico é um processo mais cuidadoso e é feito mais devagar do que o pulo (quando as pernas giram bruscamente para a direção contraria a do campo, o que vai fazer o robô saltar na direção do campo).
Os eletroscópios colados nas laterais da caixa (primeira imagem) serão feitos em tilhos feitos de madeira que nossa professora forneceu:
Notem que o esquema de montagem acima é o mesmo apresentado na postagem anterior. Como iremos fazer uma apresentação daqui a poucos dias, vamos deixar nosso blog com um gostinho de "quero mais" e parar por aqui.
Na próxima postagem iremos postar os videos dos testes que fizemos ao longo da montagem do robô, e também a apresentação que foi mostrada em sala de aula.
Grande abraço a todos e nos desejem sorte.

















{kind=link}
{kind=link}