Como dito na postagem anterior para fazer um motor elétrico mover para os dois lados é necessário inverter sua polaridade.
Pois bem, mas se vc também é noob como projetista e quer montar um robô automático assim como o nosso, deve estar se perguntando "Como vou fazer isso sem por a mão no motor ou nos fios?!".
Após algumas conversas com o pessoal de eletrônica do laboratório de física da nosso campi (aquém aqui vai um agradecimento), descobrimos um circuito chamado Ponte H.
O nome parece ser devido ao “skemão” do circuito (assim como nas figuras do post anterior, considere a posição do motor como deitado sendo apontado para você):

Bom, com a imagem acima já deu pra deixar bem claro, mas explicando melhor: Observando as quatro chaves, dentre as chaves eletrônicas, o uso de transistores é o mais adequado. De acordo com a combinação das chaves uma tensão diferente será aplicada nas escovas do motor, alterando a polaridade do eletroímã e o movimento do motor.

{kind=link}
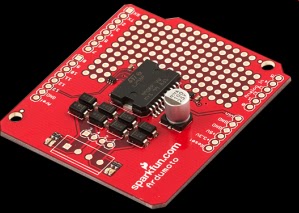
Para a salvação de nós projetistas entusiastas, existe um shield para Arduino que já vem com um esquema de ponte H pronto e pode gerenciar até 2 motores elétricos, chama-se Ardumoto e pode ser encontrado no site da robocore.
As imagens e algumas informações são do link: Montagem de uma ponte h (PDF)
Nenhum comentário:
Postar um comentário