Nas postagens anteriores ouvimos falar muito sobre os Servo motores, e neste post estaremos explicando um pouco sobre seu funcionamento.
O servo motor é constituído de um CI de controle, que tem a função de receber o sinal do controlador, monitorar a posição na qual ele se encontra, e trabalhar com o potenciômetro para mover o motor.
O servo motor é, um potenciômetro, um motor elétrico, engrenagens que reduzem a rotação do motor e transferem mais força para o eixo, tudo isso numa caixinha de plástico (buniteenha).

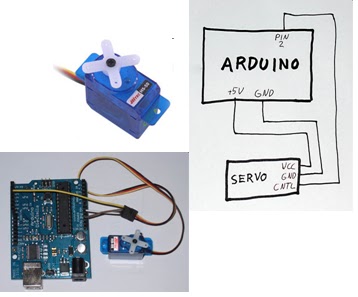
Para alimentar o servo é preciso no mínimo, 4.8 volts. Nosso controlador, o Arduino, pode mandar para o servo uma tensão de 0 até 5 volts em um intervalo de 1 milissegundo até 2 milissegundos
A velocidade do sinal que o Arduino manda para o servo é o que determina a posição pra qual o servo vai se mover, é ai que entra o CI de controle do servo e o potênciometro ;)
Um sinal de 1ms corresponde a uma posição do braço do servo todo a esquerda ou 0º
Um sinal de 1,5ms é o que chamamos de posição central do servo ou 90º
Um sinal de 2ms corresponde a uma posição do braço do servo todo a direita ou 180º
Um sinal de 1,5ms é o que chamamos de posição central do servo ou 90º
Um sinal de 2ms corresponde a uma posição do braço do servo todo a direita ou 180º

Detalhe! O Servo motor não roda mais que 180º, existem racks que fazer eles girarem continuamente, mas isso lobotomiza o servo e você não terá mais controle sobre ele, muito menos sobre o sentido de sua rotação.

Potenciômetro
Potenciômetros são resistores com uma variação central e a resistência entre seus dois extremos é fixa em seu valor nominal. Já o valor de resistência entre uma das extremidades depende do posicionamento do cursor.
Cria-se, então, uma estrutura que pode ser compreendida como dois resistores em série:

{kind=link}
As informações sobre Servo motores foram retiradas do site Asas Elétricas
E as informações sobre Potenciômetro do site Saber Eletrônica Online
E as informações sobre Potenciômetro do site Saber Eletrônica Online
Nenhum comentário:
Postar um comentário