Iremos dividir o código abaixo em funções para que fique melhor organizado. O código abaixo foi testado e funciona perfeitamente:
/*
Atenção para que o robô possa funcionar corretamente as seguintes regras devem valer:
1. Se fótoscópio norte é o 1 (ligado na serial 0) servo do norte é o 2 (ligado na digital pwm 5);
2. Se fótoscópio sul é o 2 (ligado na serial 1) servo do sul é o 1 (ligado na digital pwm 3);
3. Se fótoscópio leste é o 3 (ligado na serial 3) servo do leste é o 4 (ligado na digital pwm 9);
4. Se fótoscópio oeste é o 4 (ligado na serial 4) servo do oeste é o 3 (ligado na digital pwm 6);
*/
#include <Servo.h> //Esta biblioteca contem as operações para manuseio e reconhecimento dos servos
Servo servo[4]; //Cria um vetor do tipo servo para os 4 servos (o tipo servo é tipo importado da biblioteca servo.h)
//cria constantes inteiras relativas as portas de entrada analógicas
const int pinLDRtower1 = 0; //pino do fótoscópio 1 na porta 0, etc...
const int pinLDRtower2 = 1;
const int pinLDRtower3 = 2;
const int pinLDRtower4 = 3;
//criação das variáveis
int LDRtower[5]; //variável do tipo número inteiro que irá receber a tensão do circuito do fotoscópio
int sensibilidade = 390; //variável do tipo número inteiro indicando a quantidade mínima de bits recebidos pela porta analógica quando ha presença e luz
int contador; //variável do tipo número inteiro que servirá de contador. Será usado para comparar qual fótoscópio recebeu sinal maior
int daVez; //variável que irá definir qual fótoscópio o robô tem que seguir (qual é o da vez)
int fonteLuzDetectada; //variável do tipo número inteiro que servirá de semáforo para dar inicio aos movimentos do robô caso haja uma fonte emisora de fótons
void setup(){
//mostrar para o CI onde estão ligados os Servos
servo[0].attach(3); //servo 0 corresponde ao primeiro servo ligado na porta 3, assim por diante...
servo[1].attach(5);
servo[2].attach(6);
servo[3].attach(9);
//inicializo cada valor do vetor que recebe os valores do fótoscópio com 0
for(contador = 1; contador < 5; contador++){
LDRtower[contador] = 0;
}
//inicializo o funcionamento da porta serial com leitura 9600bps (bps = bites por segundo)
Serial.begin(9600);
}
void zerarVarDeControle(int daVez, int fonteLuzDetectada){
//zerar as variáveis que iram definir qual lado o robô deve seguir
daVez = 0;
fonteLuzDetectada = 0;
}
void receberLeiturasAssociandoFotoscopioaPino(int LDRtower[4], int pinLDRtower1, int pinLDRtower2, int pinLDRtower3, int pinLDRtower4){
//faz com que cada valor do vetor de fótoscopios receba as medidas de suas respectivas portas
LDRtower[1] = analogRead(pinLDRtower1); //A torre do LDR 1 recebe os valores da porta analógica 0 (pinLDRtower1), e assim por diante...
LDRtower[2] = analogRead(pinLDRtower2);
LDRtower[3] = analogRead(pinLDRtower3);
LDRtower[4] = analogRead(pinLDRtower4);
}
void funcaoDeixarRobodePe(Servo servo[4]){
//deixa o robô em pé colocando todos os servos num angulo de 90º
servo[0].write(90);
servo[1].write(90);
servo[2].write(90);
servo[3].write(90);
}
int verificaRecepcaoLuminosa(int contador, int LDRtower[4], int sensibilidade, int fonteLuzDetectada){
//verifica se algum fotoscopio recebeu sinal luminoso
for (contador = 1; contador < 5; contador++){
if (LDRtower[contador] > sensibilidade) fonteLuzDetectada = 1;
}
return(fonteLuzDetectada);
}
int achaMaior(int daVez, int contador, int LDRtower[4]){
//verifica qual fotoscopio recebeu sinal maior e taxa-o como daVez
daVez = 1;
for (contador = 2; contador < 5; contador++) if (LDRtower[daVez] < LDRtower[contador]) daVez = contador;
return(daVez);
}
void irEmDirecaoAoFotoscopio1(Servo servo[4]){
//movimento de sincrono que inicia a movimentação do robô em direção ao fotoscopio 1:
//deita uma perna
servo[0].write(45);
servo[1].write(90);
servo[2].write(90);
servo[3].write(90);
delay(500);
servo[0].write(0);
servo[1].write(90);
servo[2].write(90);
servo[3].write(90);
delay(500);
//deita a outra
servo[0].write(0);
servo[1].write(135);
servo[2].write(135);
servo[3].write(135);
delay(500);
servo[0].write(0);
servo[1].write(180);
servo[2].write(180);
servo[3].write(180);
delay(100);
//pula!
servo[0].write(180);
servo[1].write(0);
servo[2].write(180);
servo[3].write(180);
delay(500);
//levanta uma perna
servo[0].write(135);
servo[1].write(0);
servo[2].write(135);
servo[3].write(135);
delay(500);
servo[0].write(90);
servo[1].write(0);
servo[2].write(90);
servo[3].write(90);
delay(500);
//levanta a outra
servo[0].write(90);
servo[1].write(45);
servo[2].write(90);
servo[3].write(90);
delay(500);
servo[0].write(90);
servo[1].write(90);
servo[2].write(90);
servo[3].write(90);
delay(500);
}
void irEmDirecaoAoFotoscopio2(Servo servo[4]){
//movimento de sincrono que inicia a movimentação do robô em direção ao fotoscopio 2:
//deita uma perna
servo[0].write(90);
servo[1].write(45);
servo[2].write(90);
servo[3].write(90);
delay(500);
servo[0].write(90);
servo[1].write(0);
servo[2].write(90);
servo[3].write(90);
delay(500);
//deita a outra
servo[0].write(135);
servo[1].write(0);
servo[2].write(135);
servo[3].write(135);
delay(500);
servo[0].write(180);
servo[1].write(0);
servo[2].write(180);
servo[3].write(180);
delay(100);
//pula!
servo[0].write(0);
servo[1].write(180);
servo[2].write(180);
servo[3].write(180);
delay(500);
//levanta uma perna
servo[0].write(0);
servo[1].write(135);
servo[2].write(135);
servo[3].write(135);
delay(500);
servo[0].write(0);
servo[1].write(90);
servo[2].write(90);
servo[3].write(90);
delay(500);
//levanta a outra
servo[0].write(45);
servo[1].write(90);
servo[2].write(90);
servo[3].write(90);
delay(500);
servo[0].write(90);
servo[1].write(90);
servo[2].write(90);
servo[3].write(90);
delay(500);
}
void irEmDirecaoAoFotoscopio3(Servo servo[4]){
//movimento de sincrono que inicia a movimentação do robô em direção ao fotoscopio 3:
//deita uma perna
servo[0].write(90);
servo[1].write(90);
servo[2].write(45);
servo[3].write(90);
delay(500);
servo[0].write(90);
servo[1].write(90);
servo[2].write(0);
servo[3].write(90);
delay(500);
//deita a outra
servo[0].write(135);
servo[1].write(135);
servo[2].write(0);
servo[3].write(135);
delay(500);
servo[0].write(180);
servo[1].write(180);
servo[2].write(0);
servo[3].write(180);
delay(100);
//pula!
servo[0].write(180);
servo[1].write(180);
servo[2].write(180);
servo[3].write(0);
delay(500);
//levanta uma perna
servo[0].write(135);
servo[1].write(135);
servo[2].write(135);
servo[3].write(0);
delay(500);
servo[0].write(90);
servo[1].write(90);
servo[2].write(90);
servo[3].write(0);
delay(500);
//levanta a outra
servo[0].write(90);
servo[1].write(90);
servo[2].write(90);
servo[3].write(45);
delay(500);
servo[0].write(90);
servo[1].write(90);
servo[2].write(90);
servo[3].write(90);
delay(500);
}
void irEmDirecaoAoFotoscopio4(Servo servo[4]){
//movimento de sincrono que inicia a movimentação do robô em direção ao fotoscopio 4:
//deita uma perna
servo[0].write(90);
servo[1].write(90);
servo[2].write(90);
servo[3].write(45);
delay(500);
servo[0].write(90);
servo[1].write(90);
servo[2].write(90);
servo[3].write(0);
delay(500);
//deita a outra
servo[0].write(135);
servo[1].write(135);
servo[2].write(135);
servo[3].write(0);
delay(500);
servo[0].write(180);
servo[1].write(180);
servo[2].write(180);
servo[3].write(0);
delay(100);
//pula!
servo[0].write(180);
servo[1].write(180);
servo[2].write(0);
servo[3].write(180);
delay(500);
//levanta uma perna
servo[0].write(135);
servo[1].write(135);
servo[2].write(0);
servo[3].write(135);
delay(500);
servo[0].write(90);
servo[1].write(90);
servo[2].write(0);
servo[3].write(90);
delay(500);
//levanta a outra
servo[0].write(90);
servo[1].write(90);
servo[2].write(45);
servo[3].write(90);
delay(500);
servo[0].write(90);
servo[1].write(90);
servo[2].write(90);
servo[3].write(90);
delay(500);
}
//função padrão do Arduino, pode ser interpretada como principal, e fica em constante loop
void loop(){
//zerar as variáveis que iram definir qual lado o robô deve seguir
zerarVarDeControle(daVez, fonteLuzDetectada);
//faz com que cada valor do vetor de fótoscopios receba as medidas de suas respectivas portas
receberLeiturasAssociandoFotoscopioaPino(LDRtower, pinLDRtower1, pinLDRtower2, pinLDRtower3, pinLDRtower4);
//deixa o robô em pé colocando todos os servos num angulo de 90º
funcaoDeixarRobodePe(servo);
//verifica se algum fótoscópio recebeu o sinal luminoso
fonteLuzDetectada = verificaRecepcaoLuminosa(contador, LDRtower, sensibilidade, fonteLuzDetectada);
//se recebeu quem recebeu o sinal maior
if (fonteLuzDetectada == 1){
daVez = achaMaior(daVez, contador, LDRtower);
//uma vez que se sabe qual é o maior sinal luminoso de acordo com a variável daVez, executa-se seu respectivo movimento de acordo com o valor de daVez.
switch (daVez) {
case 1: //verifica se o fotoscópio da vez é o 3
while(daVez == 1){ //executa as funções abaixo até que o daVez não seja mais o 1
//faz o robô andar em direção da luz recebida pelo fótoscópio 1 até que ela suma ou outro fótoscópio receba luminosidade maior
irEmDirecaoAoFotoscopio1(servo);
//zerar as variáveis que iram definir qual lado o robô deve seguir
zerarVarDeControle(daVez, fonteLuzDetectada);
//faz com que cada valor do vetor de fótoscopios receba as medidas de suas respectivas portas
receberLeiturasAssociandoFotoscopioaPino(LDRtower, pinLDRtower1, pinLDRtower2, pinLDRtower3, pinLDRtower4);
//verifica se algum fótoscópio recebeu o sinal luminoso
fonteLuzDetectada = verificaRecepcaoLuminosa(contador, LDRtower, sensibilidade, fonteLuzDetectada);
//verifica qual fotoscopio recebeu sinal maior no case de deteccao de luz
if (fonteLuzDetectada == 1){
daVez = achaMaior(daVez, contador, LDRtower);
}
}
break;
case 2: //verifica se o fotoscópio da vez é o 2
while(daVez == 2){ //executa as funções abaixo até que o daVez não seja mais o 2
//faz o robô andar em direção da luz recebida pelo fótoscópio 2 até que ela suma ou outro fótoscópio receba luz maior
irEmDirecaoAoFotoscopio2(servo);
//zerar as variáveis que iram definir qual lado o robô deve seguir
zerarVarDeControle(daVez, fonteLuzDetectada);
//faz com que cada valor do vetor de fótoscopios receba as medidas de suas respectivas portas
receberLeiturasAssociandoFotoscopioaPino(LDRtower, pinLDRtower1, pinLDRtower2, pinLDRtower3, pinLDRtower4);
//verifica se algum fótoscópio recebeu o sinal luminoso
fonteLuzDetectada = verificaRecepcaoLuminosa(contador, LDRtower, sensibilidade, fonteLuzDetectada);
//verifica qual fotoscopio recebeu sinal maior no case de deteccao de luz
if (fonteLuzDetectada == 1){
daVez = achaMaior(daVez, contador, LDRtower);
}
}
break;
case 3: //verifica se o fotoscópio da vez é o 3
while(daVez == 3){ //executa as funções abaixo até que o daVez não seja mais o 3
//faz o robô andar em direção da luz recebida pelo fótoscópio 3 até que ela suma ou outro fótoscópio receba luminosidade maior
irEmDirecaoAoFotoscopio3(servo);
//zerar as variáveis que iram definir qual lado o robô deve seguir
zerarVarDeControle(daVez, fonteLuzDetectada);
//faz com que cada valor do vetor de fótoscopios receba as medidas de suas respectivas portas
receberLeiturasAssociandoFotoscopioaPino(LDRtower, pinLDRtower1, pinLDRtower2, pinLDRtower3, pinLDRtower4);
//verifica se algum fótoscópio recebeu o sinal luminoso
fonteLuzDetectada = verificaRecepcaoLuminosa(contador, LDRtower, sensibilidade, fonteLuzDetectada);
//verifica qual fotoscopio recebeu sinal maior no case de deteccao de luz
if (fonteLuzDetectada == 1){
daVez = achaMaior(daVez, contador, LDRtower);
}
}
break;
case 4: //verifica se o fotoscópio da vez é o 4
while(daVez == 4){ //executa as funções abaixo até que o daVez não seja mais o 4
//faz o robô andar em direção da luz recebida pelo fótoscópio 4 até que ela suma ou outro fótoscópio receba luz maior
irEmDirecaoAoFotoscopio1(servo);
//zerar as variáveis que iram definir qual lado o robô deve seguir
zerarVarDeControle(daVez, fonteLuzDetectada);
//faz com que cada valor do vetor de fótoscopios receba as medidas de suas respectivas portas
receberLeiturasAssociandoFotoscopioaPino(LDRtower, pinLDRtower1, pinLDRtower2, pinLDRtower3, pinLDRtower4);
//verifica se algum fótoscópio recebeu o sinal luminoso
fonteLuzDetectada = verificaRecepcaoLuminosa(contador, LDRtower, sensibilidade, fonteLuzDetectada);
//verifica qual fotoscopio recebeu sinal maior no case de deteccao de luz
if (fonteLuzDetectada == 1){
daVez = achaMaior(daVez, contador, LDRtower);
}
}
break;
default:
//se nada acontecer deixa o robô de pé escrevendo um angulo de 90º em todos os servos
funcaoDeixarRobodePe(servo);
break;
}
delay(180); //tempo em microssegundos que a aplicação é repedida
}
}
quarta-feira, 15 de junho de 2011
Ultima apresentação
Esses são os slides da nossa ultima apresentação. Já que na ultima apresentação nós ficamos durante 30 minutos falando sobre os princípios físicos e o funcionamento de cada componente do robô e as dificuldades que encontramos durante o desenvolvimento do mesmo não havia muito o que se falar nesta ultima apresentação:
Breve estaremos aperfeiçoando o poster e postando novamente.
Projeto Arduino
View more presentations or Upload your own.
Breve estaremos aperfeiçoando o poster e postando novamente.
segunda-feira, 13 de junho de 2011

segunda-feira, 6 de junho de 2011
LDR
O Light Dependent Resistor (LDR), como o nome já da uma dica, é um resistor que varia sua resistividade de acordo com a incidência luminosa.
Um LDR quando não está em contato com a luz costuma ter uma resistividade de 1000000Ω, esta resistividade diminui com incidência da luz obedecendo a formula R = LCA, onde L é a luminosidade em Lux, A é o valor da corrente que passa por ele e C é a constante que depende do material que foi usado para construir o LDR. A resistência mínima do LDR sobre incidência de luz é de 100Ω.


O LDR que também é conhecido como fotoresistência ou célula fotocondutiva é constituído de um material fotossensível conectado a dois eletrodos metálicos, esse material pode ser sulfeto ou seleneto de Cádmio ou sulfeto de Chumbo (Obs: material também usado nos filmes das antigas maquinas fotográficas).

Mas como funciona?
O LDR é um semicondutor, quando existe a incidência de luz, os fótons levam os elétrons da camada de valência para a camada de condução que é mais longe da zona proibida. O aumento do número de elétrons na camada de condução é o que diminui a resistividade (não entendeu? Veja + sobre semicondutores).
Quem usa o LDR?
Um bom exemplo do uso de LDR são os postes de iluminação, a luzes das praças, sensores de luminosidade e o incrível instrumento a laser dos nossos amigos do projeto Projeto de Física para Computação.

O que isso ajuda para nós?
(Já agradecendo ao Enio Benatti da comunidade Laboratório de Garagem e a nossa querida professora Mariza Cavalcante por ter nos avisado de antemão)
Os eletroscópios por nós criados nesse projeto, apresentam uma inconveniência na funcionalidade de nosso robô.
Pois o mesmo possui muita variação e interferência, mesmo utilizando um algoritmo para filtragem dos valores recebidos pelo Arduino (breve postaremos os códigos) ainda assim o FET de vez em quando muda o valor da sua resistividade. Exemplo: Se o circuito deverá ascender uma lâmpada na presença de um campo, as vezes a lâmpada ascende e as vezes apaga.
Sendo assim nosso robô não poderia caçar fantasmas :P.
A solução foi mudar o componente FET para uma fotocélula.
Então modificamos o circuito da seguinte maneira:

{kind=link}
Desta maneira não há muita influência na programação do nosso robô (pois a tensão aplicada é a mesma) e tendo em vista que alguns “espectros” produzem fótons o nome do robô será o mesmo.
(OBS: Não acreditamos em fantasmas, o nome do robô foi dado devido a forma que ele se comporta, brincadeiras aparte ;)
Links de pesquisa:
Toni Eletrônica
Feira de Ciencias
Mundo Educacao
Technology Student
LDR - Light Dependent Resistor
sexta-feira, 27 de maio de 2011
Robô ghost hunter prototype
No dia 10/05 foi apresentado um prototipo do nosso robô. Ele foi montado da seguinte maneira:
 Os servos são as caixinhas azuis na imagem acima, e os pontos cinza são as pernas dos servos (pernas unidirecionais, neste caso posicionadas em 90º). Se verificarmos a posição dos servos, observamos que as paletas (pernas) estão em linha reta em direção a paleta oposta.
Os servos são as caixinhas azuis na imagem acima, e os pontos cinza são as pernas dos servos (pernas unidirecionais, neste caso posicionadas em 90º). Se verificarmos a posição dos servos, observamos que as paletas (pernas) estão em linha reta em direção a paleta oposta.
Esta montagem possibilita que o robô salte de maneira instavel pra qualquer direção, apartir do campo detectado. Para ficar mais claro é só olhar o modelo de movimento do robô.


Como trata-se de uma montagem para apresentar nossos resultados, montamos o robô em uma caixa de papelão e "socamos" uma protoboard dentro para usar apenas um trilho para alimentação de todos os componentes (exagero, mas a idéia é usar um protoshield ou um trilho feito a mão mesmo)


Esta montagem possibilita que o robô salte de maneira instavel pra qualquer direção, apartir do campo detectado. Para ficar mais claro é só olhar o modelo de movimento do robô.


Como trata-se de uma montagem para apresentar nossos resultados, montamos o robô em uma caixa de papelão e "socamos" uma protoboard dentro para usar apenas um trilho para alimentação de todos os componentes (exagero, mas a idéia é usar um protoshield ou um trilho feito a mão mesmo)

quinta-feira, 26 de maio de 2011
Servo motores (pernas do nosso robô)
Nas postagens anteriores ouvimos falar muito sobre os Servo motores, e neste post estaremos explicando um pouco sobre seu funcionamento.
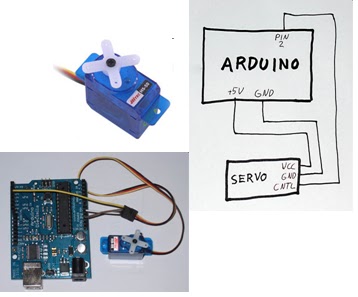
O servo motor é constituído de um CI de controle, que tem a função de receber o sinal do controlador, monitorar a posição na qual ele se encontra, e trabalhar com o potenciômetro para mover o motor.
O servo motor é, um potenciômetro, um motor elétrico, engrenagens que reduzem a rotação do motor e transferem mais força para o eixo, tudo isso numa caixinha de plástico (buniteenha).

Para alimentar o servo é preciso no mínimo, 4.8 volts. Nosso controlador, o Arduino, pode mandar para o servo uma tensão de 0 até 5 volts em um intervalo de 1 milissegundo até 2 milissegundos
A velocidade do sinal que o Arduino manda para o servo é o que determina a posição pra qual o servo vai se mover, é ai que entra o CI de controle do servo e o potênciometro ;)
Um sinal de 1ms corresponde a uma posição do braço do servo todo a esquerda ou 0º
Um sinal de 1,5ms é o que chamamos de posição central do servo ou 90º
Um sinal de 2ms corresponde a uma posição do braço do servo todo a direita ou 180º
Um sinal de 1,5ms é o que chamamos de posição central do servo ou 90º
Um sinal de 2ms corresponde a uma posição do braço do servo todo a direita ou 180º

Detalhe! O Servo motor não roda mais que 180º, existem racks que fazer eles girarem continuamente, mas isso lobotomiza o servo e você não terá mais controle sobre ele, muito menos sobre o sentido de sua rotação.

Potenciômetro
Potenciômetros são resistores com uma variação central e a resistência entre seus dois extremos é fixa em seu valor nominal. Já o valor de resistência entre uma das extremidades depende do posicionamento do cursor.
Cria-se, então, uma estrutura que pode ser compreendida como dois resistores em série:

{kind=link}
As informações sobre Servo motores foram retiradas do site Asas Elétricas
E as informações sobre Potenciômetro do site Saber Eletrônica Online
E as informações sobre Potenciômetro do site Saber Eletrônica Online
Esquema técnico do Ardumoto
Qualé eu não podia ficar devendo essa imagem:
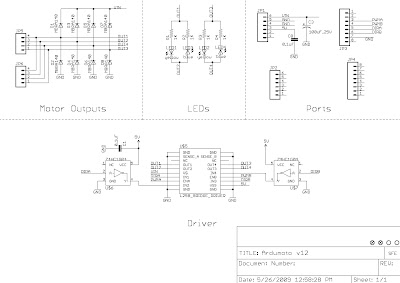
A imagem acima foi retirada do link: Ardumoto v12 (PDF)

A imagem acima foi retirada do link: Ardumoto v12 (PDF)
Assinar:
Comentários (Atom)